更新:2018/02/25
ironlev (アイアンレブ)について
『東濃リニア通信』(2月25日)が「ironlev (アイアンレブ)」に関する『ワイアード(Wired)』(以前は「ホットワイアード」)の記事を紹介しています。『ワイアード』のページは、"既存の線路の上を飛ぶように走る!? 新しい「リニアモーターカー」、イタリアのスタートアップが開発中(2018.02.23 FRI 11:00)"。「ironlev」の開発した企業のHPは、"Magnetic levitation without the need for electrical power"。
泡沫的なハイパーループは別として、磁気浮上方式鉄道の開発は日本、ドイツだけがやってきたわけで、そこへイタリアが加わるというので、日独伊三国同盟みたいな感じがしますね、と言うのはちょっと不真面目かも。
このイタリアの方式、本当に実用的なものなら、既存の鉄道のレールをそのまま使えるというので、車両の製造だけすれば良いのですから画期的です。
紹介したページの情報によれば、止まっていても浮いているようなので、「普通の」というのは超電導磁石ではない普通の永久磁石と、センサーとの組み合わせで電流制御できる電磁石を組み合わせてレールの頭部の側面との間の吸引力を利用して車体を支持する方式のようです。似た方式は名古屋のリニモでは列車の「案内」に利用していたと思います。
書類やメモを冷蔵庫のドアやホワイトボードなど鉄板でできた部分に止める磁石が付いたクリップがありますね。あれは磁石の面と鉄板の面の摩擦の力で、落ちないで留まっているようなんですが、それを少しだけ隙間をあけたらどうなるか。磁石に比べ相手の面積が広い冷蔵庫のドアなんかの場合は隙間をあければ滑り落ちてしまいます。しかし、相手が同じような面積の場合はちょっと違います。というのが次の実験。
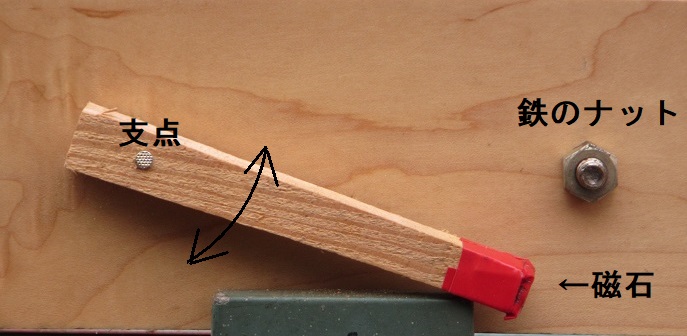
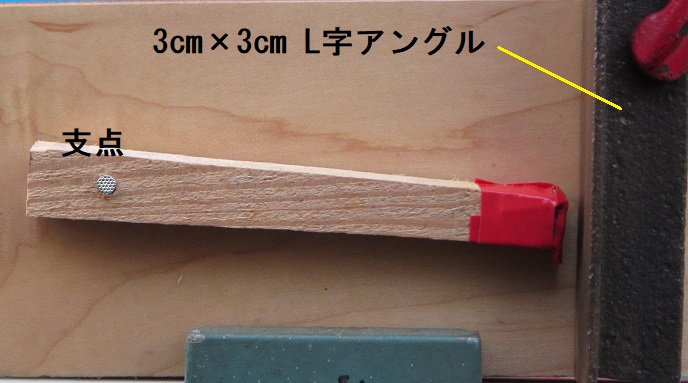
板に腕が取り付けてあります。腕の右端には磁石が付いています(赤いところ)。腕は支点を中心に上下に動きます。磁石の相手として鉄のナットが右側にあります。ナットと磁石の間には隙間があります。
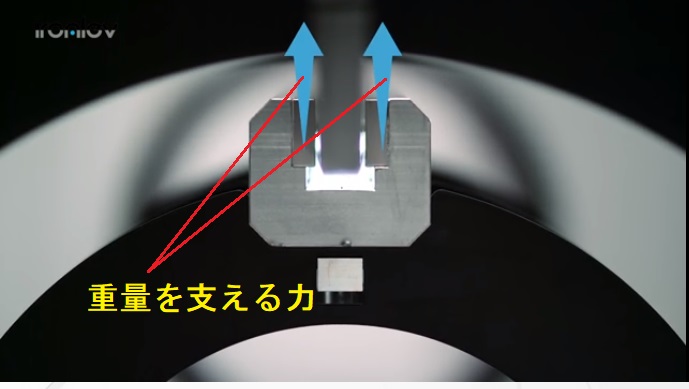
腕を持ち上げて、磁石とナットを向き合うようにすると、写真のように隙間があっても腕は止まっています。磁石が腕の重さを支えています。
ざっといえばアイアンレブの原理はこんなところでしょうか。問題は磁石と相手の鉄の部分の隙間を調整する方法です。これを電子的に制御するんですよとアイアンレブのHPでは言っています。永久磁石は磁石の強さを変化出来ないので、多分、センサーを使って電流をコントロールできる電磁石を組み合わせて使うのだと思います。ただし、原理説明の実験装置や、『ワイアード』で報じられた自動車を載せた実験装置では、まだ電子的な制御システムは装備されていないようです。浮上原理だけのプレゼンテーションのようです。
以下、アイアンレブのHPの説明です(写真は2つの説明ビデオの画面より)。
原理を説明する実験装置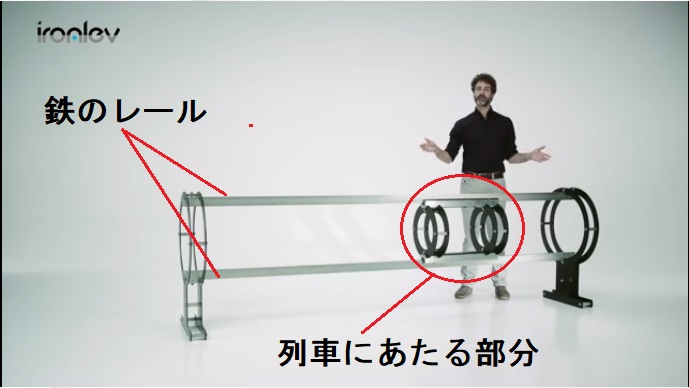
スライダーが上下にある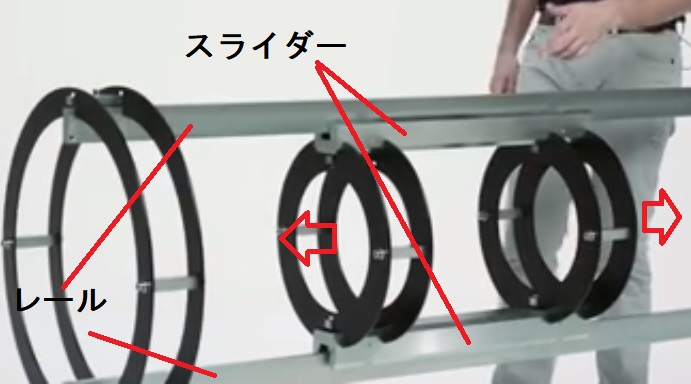
下のスライダーは装置の動く部分をレールの中心にそろえるためと説明(※)
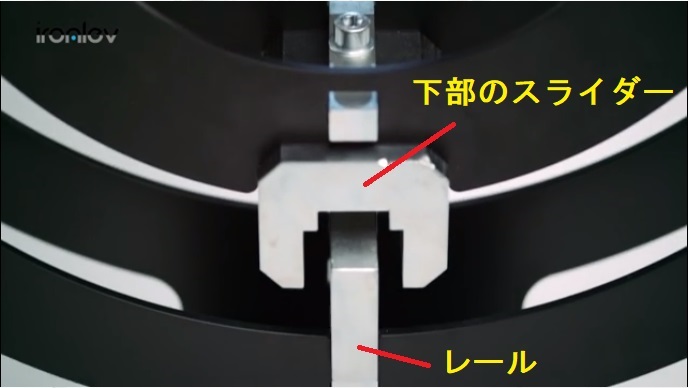
上のスライダーに技術の核心部分があると説明
上の簡単な実験と同じ原理ですね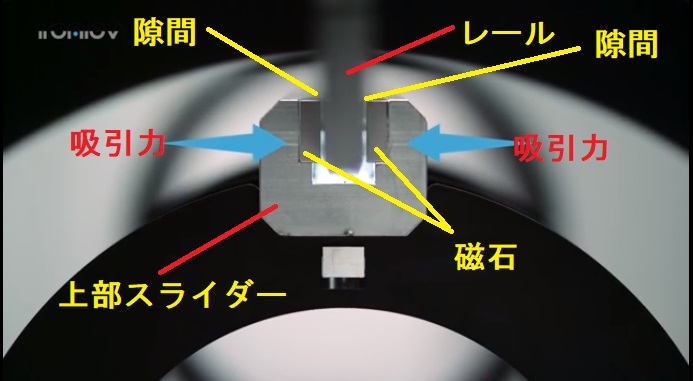
(ただし、正直いって、※ 部分の説明、下のスライダーでどうやって上のスライダーの中心を出すのかというメカニズムが理解できません。あるいは、上部スライダーとレールの間の隙間を維持する方法の見当がつきません。)
補足:「中心にそろえるため」、「安定化させるため(stabilize)」ともいっているようです。
次の、自動車をのせた大型の実験装置では上の装置とはスライダーの向きが、上下逆になりますが、重さを支える力が働くことは同じです。
自動車をのせた大型の実験装置
リニア地下鉄のようにリアクションプレートをレールの間に設置するか駆動用のコイルを設置すれば、人力で引っ張らなくても列車を走らせることはできるはずです。
{kind=link}
台座の下の構造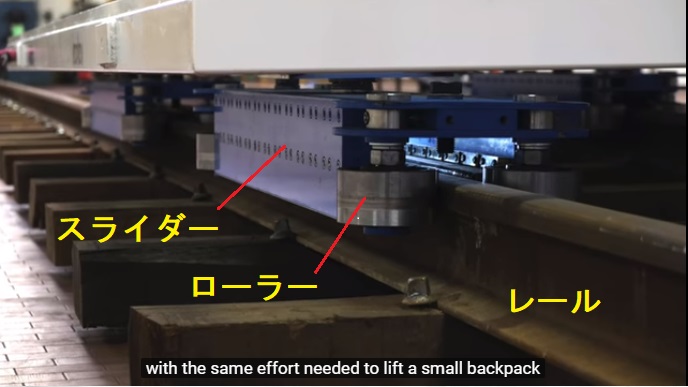
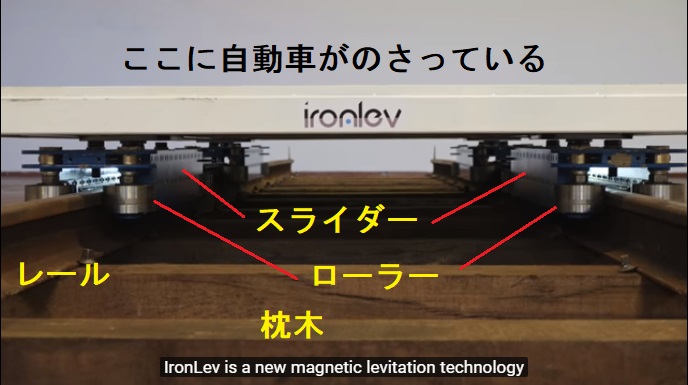
ビデオではローラーが常に回転しています
したがってまだ隙間を制御する技術は搭載されていない
スライダー装置のイメージ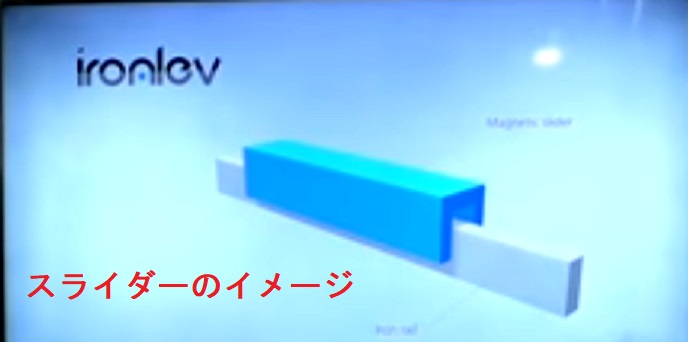
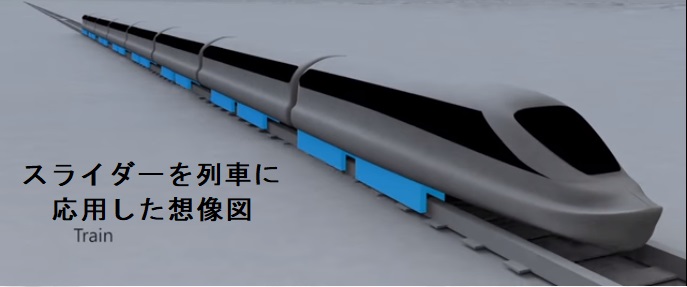
このスライダーを従来の列車の台車と取り換えるというアイデアのようです。参考として、トランスラピッドは車体の全長にわたって電磁石を取り付けています。
隙間を電子的に制御するというのはトランスラピッドと同じ考え方です。競合相手になるだろう他のモノレールみたいな乗り物や磁気浮上式鉄道の写真がHPにありますが、JR東海のリニアがありません。トランスラピッド(上海リニア)はありますが・・・。遠慮してるのか、かなわないと思っているのか、無視しているのか、さていったいどれでしょう?
『ワイアード』も書いてますが、やはり分岐装置が問題だと思います。ポイントがポイント。
補足 2018/02/26
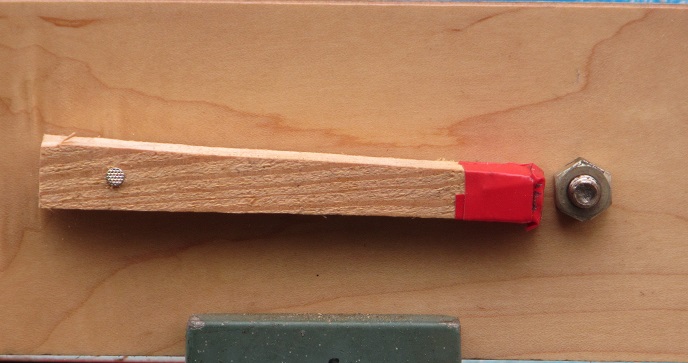
念のため磁石の相手の面積が広い場合も実験してみました。
結果は同じで腕はほぼ水平な位置で留まっています。支点があるからです。なければというのは、磁石付きクリップの場合は、磁石と鉄板の間に紙などをある程度挟んだりすれば滑り落ちます。書類を止める磁石でも同じですね。
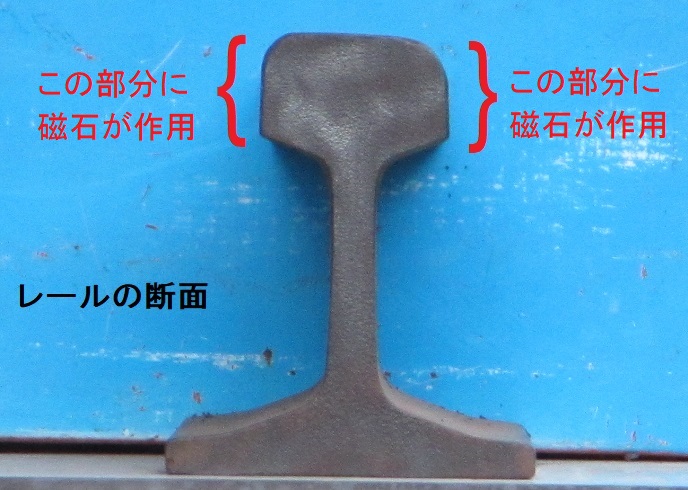
鉄道のレール(写真は50㎏レール)では頭部と枕木に接する部分の間は厚みが少ないので頭部の下側に段が出来ています。そのような条件でも磁石が留まっているだろうということを試したつもりです。
アイアンレブのHPの円形の模型を使った実験では、上下を逆にして、相手のレールの縁の近くでも磁力で重さを支えることができるのを示したのでしょう。
既存の列車の台車をスライダーに置き換えるだけで良いみたいなことを言っています。しかし、トランスラピッドは列車の全長にわたって隙間なく浮上用の電磁石を配置しています。荷重の分散と冗長性のためだそうです。

ポイントの問題は別にしても、このアイアンレブ、高速鉄道への応用が本当に可能なのかやや疑問です。また、自動車を使ったデモンストレーションでレールとの間隔=ギャップを保つためにローラーを使っていますから、ギャップを制御するという磁気浮上式鉄道では技術の上で一番肝心の部分についてデモンストレーションできていないことになりますね。ローラーがあっては、ローラーがどうしても必要というなら、高速鉄道にはどうかなって気がしませんか?
それから、浮上しているのですから、列車を走らせるにはリニアモーターを使うことになると思います。台車をスライダーに置き換えるだけ、既存のレールを使うのでコストがかからないというのがうたい文句であれば、車上一次方式を採用することになるでしょう。とすれば、都営大江戸線のような誘導式のリニアモーター駆動になってせいぜい100㎞/h程度のスピードしか出ないのではないかとも思います。だったら鉄の車輪のままでいいんじゃないですか。
もう一つ。スライダーは左右にあります。鉄道の線路の幅は必ずしも一定ではありません。カーブでは若干広めになります。経年変化で狂いが生じることもあるでしょう。スライダーの左右は台車直結でなくサスペンションやそれに代わる仕組みを介して取り付ける必要があるはず。自動車を乗せた実験装置には左右の不均一を調整する仕組みも搭載されていませんね。
つまり。磁石の吸引力で物を浮かすことができるということ以上のこと、つまり私がやった実験以上のこと、実用化するにあたって必要なギャップの制御の方法とか、駆動方式とか、サスペンションなど一番のカギになる技術について、アイアンレブが見せた実験ではプレゼンテーションが出来ていません。このアイアンレブ、なにかマユツバな印象を受けました。